Self Balancing Robot Abstract
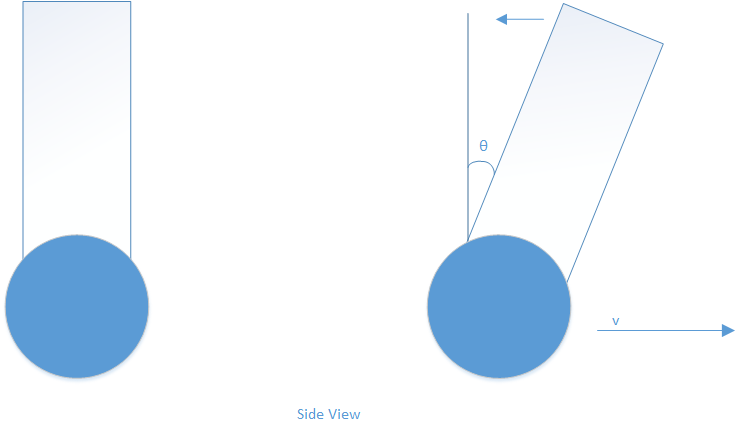
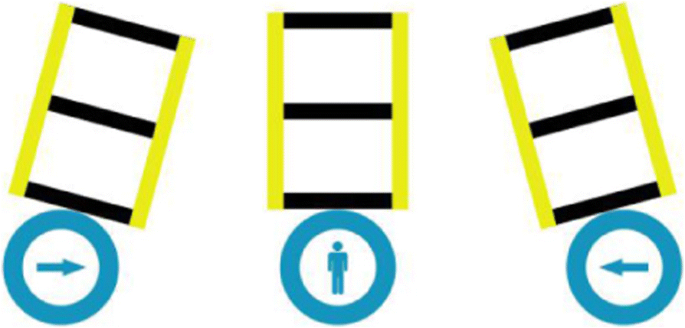
Unstable means that robot is free to fall forward or backward without any applied forces.
Self balancing robot abstract. The self balancing robot part is similar to other typical two wheeled self balancing robots such as the segway. There are four methods of self balancing of robots. Linearized equations of motion are derived and the overall model of the two wheeled self balancing robot is represented in state space realization for the purpose of state feedback controller design. The word balance means the robot is in equilibrium state which its position is like standing upright 90 degrees.
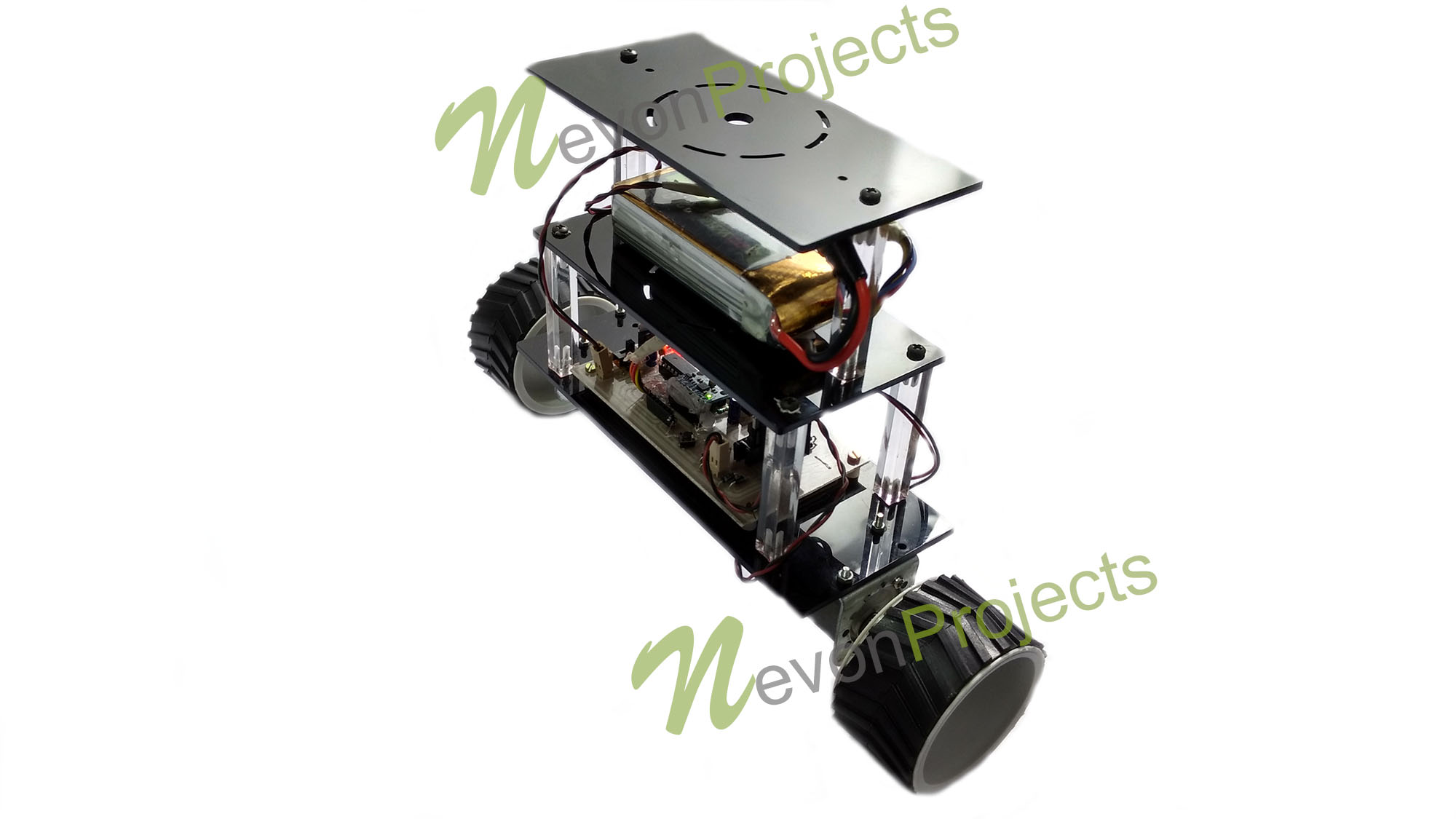
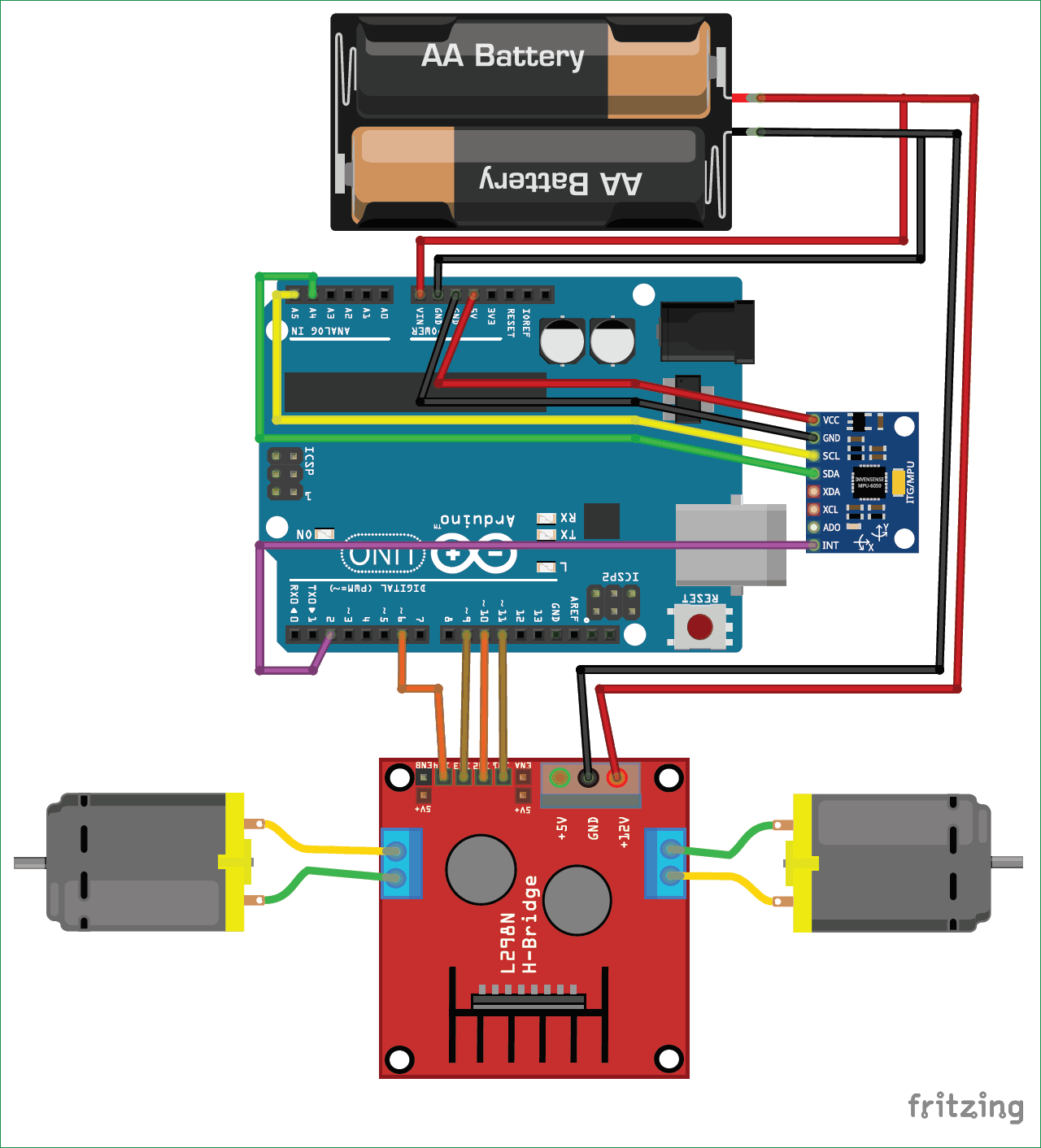
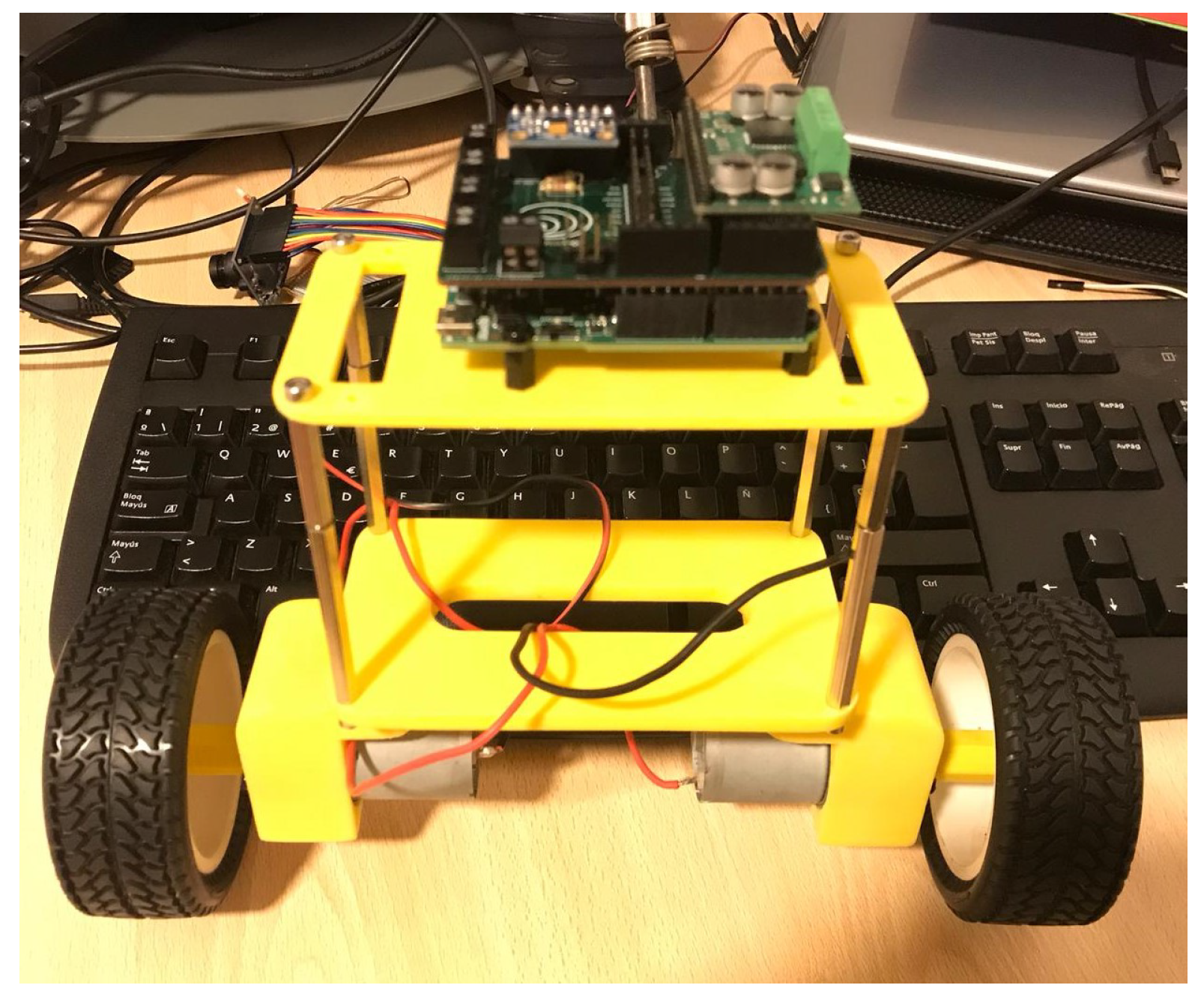
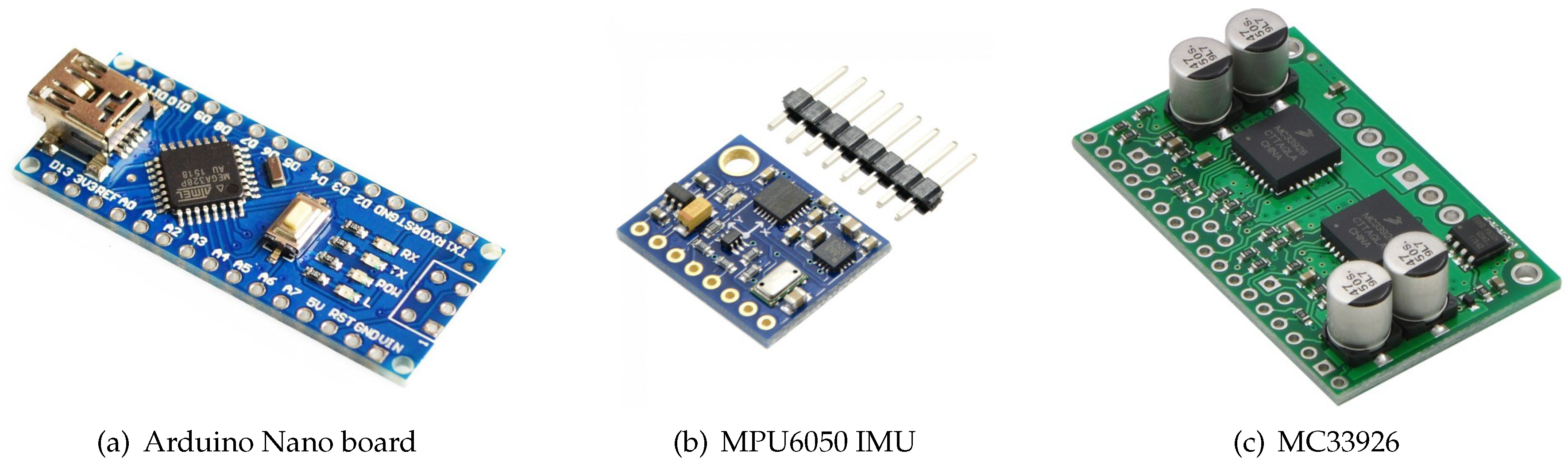
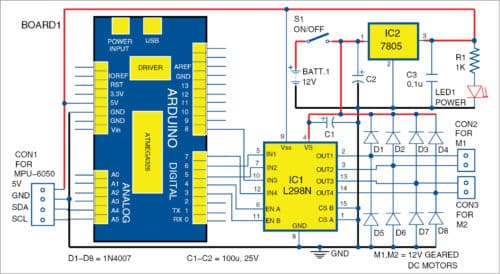
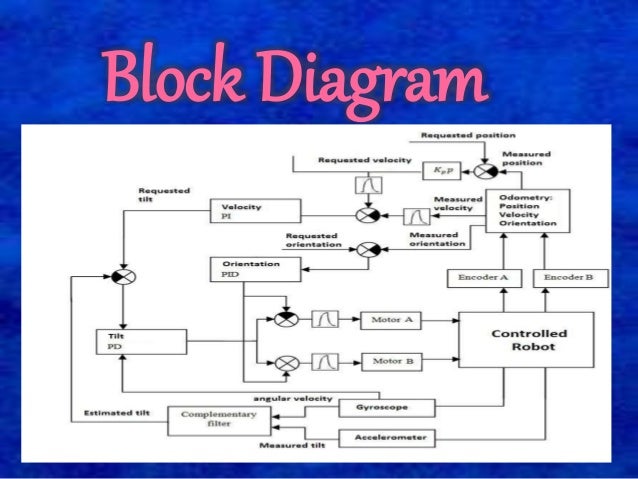
This type of robot has earned interest and fame among researchers and engineers of worldwide as it based on such. It is driven by two actuators consisting of a dc motor and a pulleybelt mechanism. The system architecture comprises a pair of dc motor and an arduino microcontroller board. This paper describes the development of kinematics model of a two wheeled self balancing robot and its control using various control techniques.
Methods of self balancing. The robot will try to balance itself on application of any unequal forces. A computer control system with processors and memory a motion control system an autonomous. Ardunio self balancing robot project date.
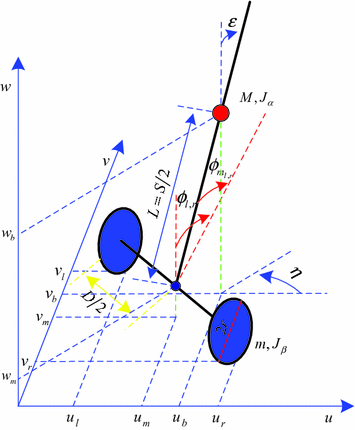
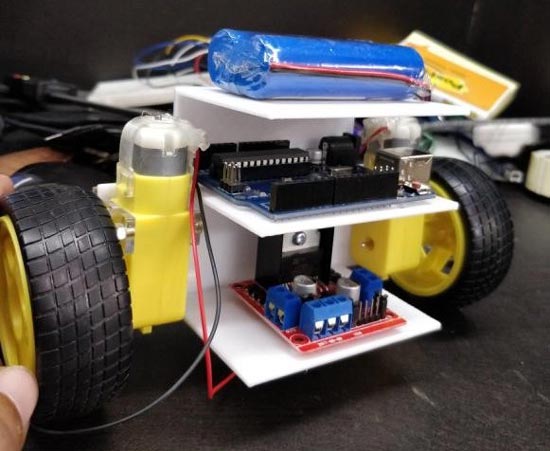
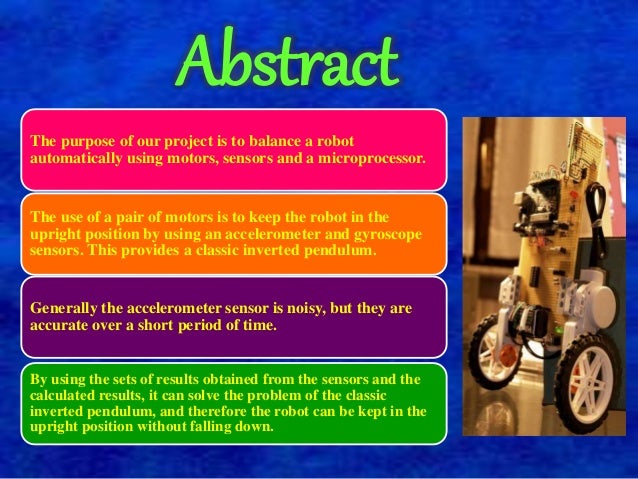
The analysis of the developed kinematic model can be divided into wheel and frame structure after one is done with design and development of mechatronics system is finalized. The use of a pair of motors is to keep the robot in the upright position by using an accelerometer and gyroscope sensors. Abstract the purpose of our project is to balance a robot automatically using motors sensors and a microprocessor. 13 balancing process of two wheel self balancing robot two wheeled balancing robot is an unstable dynamic system.
The concept of two wheel self balancing robot is based on inverted pendulum theory. These are as follow. A self balancing robot is a multi layeredtwo wheel robot. It will balance itself by application of force opposing the resultant of the forces on the robot.
Abstract this paper reports the design construction and control of a two wheel self balancing robot. Abstracttwo wheeled self balancing robot is based on an inverted pendulum system. This paper is aimed at modelling a two wheeled self balancing robot driven by the geared dc motors. A self balancing robot system providing ai humanoid robots or robot vehicles comprising a drive wheel propulsion system configured to achieve mobility and balance by means of sensoring system components accelerometers and trajectory algorithms.
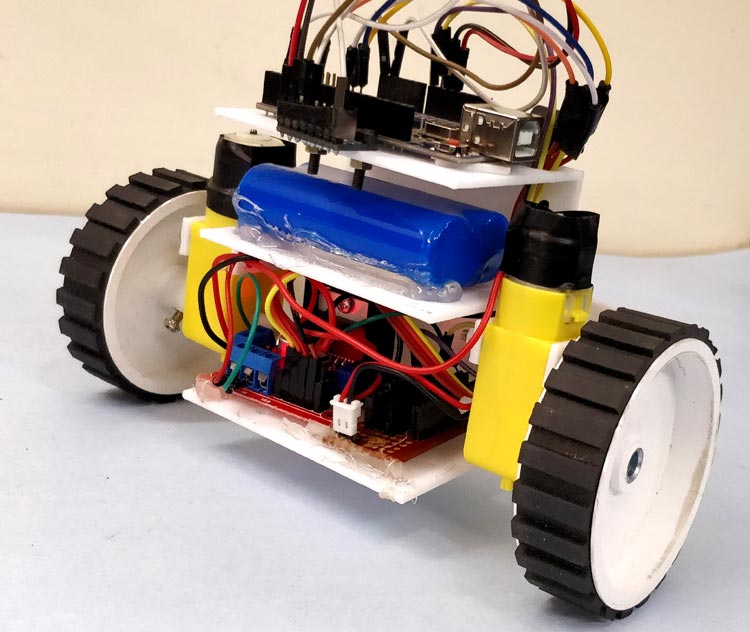
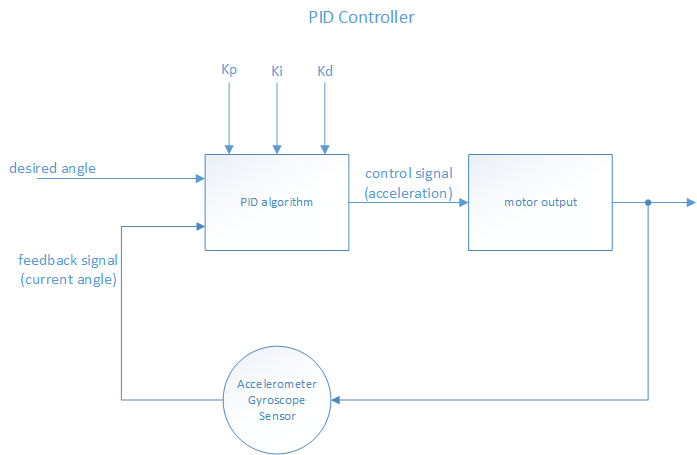
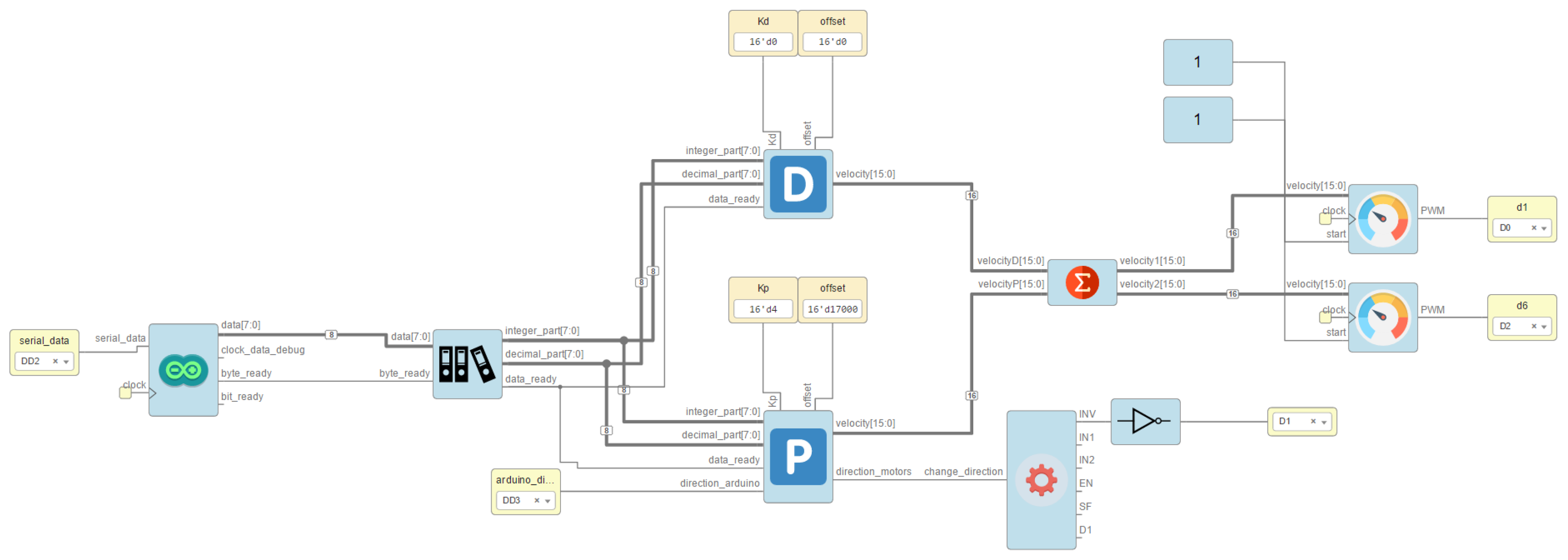
Its role is to maintain balance using movement of the wheels and body. 18650 battery holder holds 3 x batteries 3 x 18650 2100ma batteries arduino uno r2 running a pid proportionalintegralderivative motor control sketch.
Diy Self Balancing Robot Using Arduino

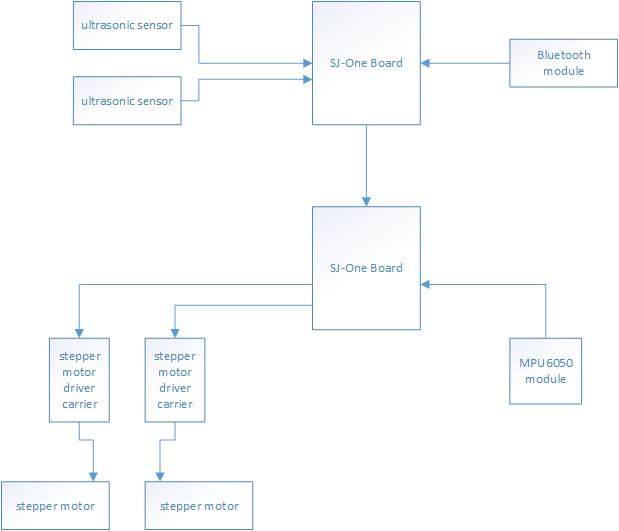
S15 Self Balancing Robot Embedded Systems Learning Academy
Driving Performance And User S Evaluation Of Self Balancing
Two Wheel Self Balancing Robot
Two Wheel Self Balancing Robot